Donghoon Baek

Hello! I’m a Postdoctoral Researcher at the Georgia Institute of Technology, working with Prof. Sehoon Ha. I received my Ph.D. in Mechanical Science and Engineering from the University of Illinois Urbana-Champaign, advised by Prof. Joao Ramos. I received my Master of Science degree in the Robotics Program from the Korea Advanced Institute of Science and Technology (KAIST), advised by Prof. Dong-soo Kwon. Prior to this, I received my Bachelor’s degree in Robotics Program from the University of Kwangwoon in the Republic of Korea, advised by Prof. Juhoon Back. I also worked as a research engineer at ROEN Surgical Inc., a medical robot startup.
My research interests lie in State Estimation, Model-based and Learning-based Control, and Embodied AI. My research goal is to build an intelligent robotic system capable of adapting and interacting with its surrounding environment. As a great application of this, I am interested in humanoid robot, manipulation, and medical robot.
selected publications
2026
- BAT: Balancing Agility and Stability via Online Policy Switching for Long-Horizon Whole-Body Humanoid ControlarXiv preprint arXiv:2604.01064, 2026
- AdaptManip: Learning Adaptive Whole-Body Object Lifting and Delivery with Online Recurrent State EstimationarXiv preprint arXiv:2602.14363, 2026
- Partial Motion Imitation for Learning Cart Pushing with Legged ManipulatorsarXiv preprint arXiv:2603.26659, 2026
2025
- Whole-Body Bilateral Teleoperation with Multi-Stage Object Parameter Estimation for Wheeled Humanoid LocomanipulationarXiv preprint arXiv:2508.09846, 2025
- Switch-JustDance: Benchmarking Whole Body Motion Tracking Policies Using a Commercial Console GamearXiv preprint arXiv:2511.17925, 2025
-
 FSL-LVLM: Friction-Aware Safety Locomotion using Large Vision Language Model in Wheeled RobotsIn 2025 IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
FSL-LVLM: Friction-Aware Safety Locomotion using Large Vision Language Model in Wheeled RobotsIn 2025 IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2025
2024
-
 Online Learning-Based Inertial Parameter Identification of Unknown Object for Model-Based Control of Wheeled HumanoidsIEEE Robotics and Automation Letters, 2024
Online Learning-Based Inertial Parameter Identification of Unknown Object for Model-Based Control of Wheeled HumanoidsIEEE Robotics and Automation Letters, 2024 -
 Toward Control of Wheeled Humanoid Robots with Unknown Payloads: Equilibrium Point Estimation via Real-to-Sim AdaptationIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Toward Control of Wheeled Humanoid Robots with Unknown Payloads: Equilibrium Point Estimation via Real-to-Sim AdaptationIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2023
-
 A Study of Shared-Control with Bilateral Feedback for Obstacle Avoidance in Whole-body Telelocomotion of a Wheeled HumanoidIEEE Robotics and Automation Letters, 2023
A Study of Shared-Control with Bilateral Feedback for Obstacle Avoidance in Whole-body Telelocomotion of a Wheeled HumanoidIEEE Robotics and Automation Letters, 2023 -
 Learning-based discrete hysteresis classifier using wire tension and compensator for flexible endoscopic surgery robotsInternational Journal of Precision Engineering and Manufacturing, 2023
Learning-based discrete hysteresis classifier using wire tension and compensator for flexible endoscopic surgery robotsInternational Journal of Precision Engineering and Manufacturing, 2023
2022
-
 Hands-free Telelocomotion of a Wheeled HumanoidIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Hands-free Telelocomotion of a Wheeled HumanoidIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 -
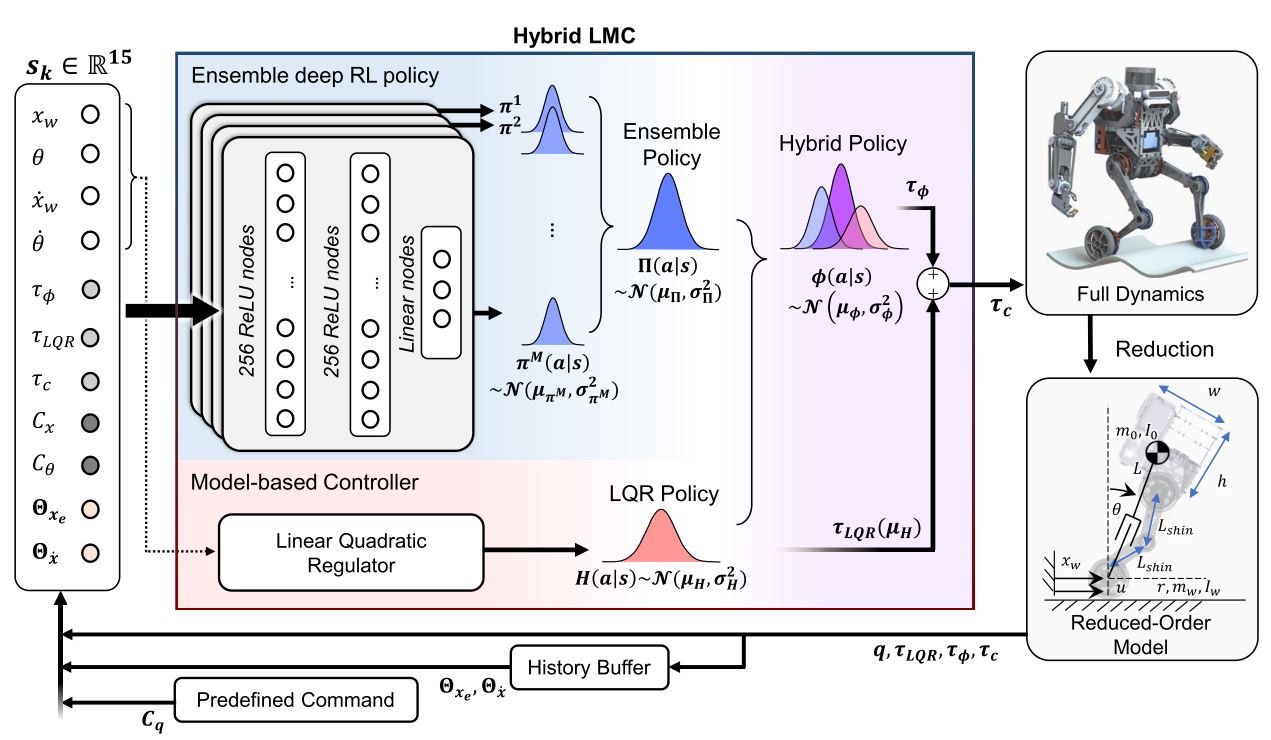 Hybrid LMC: hybrid learning and model-based control for wheeled humanoid robot via ensemble deep reinforcement learningIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Hybrid LMC: hybrid learning and model-based control for wheeled humanoid robot via ensemble deep reinforcement learningIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
2021
-
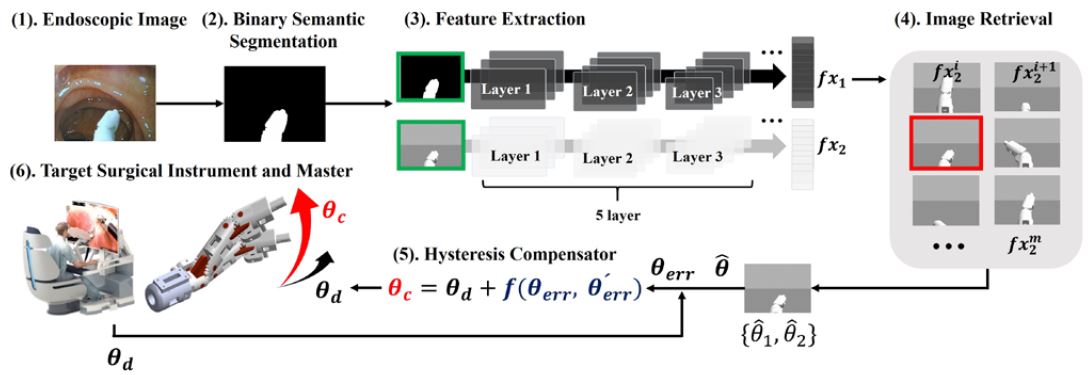
 ViO-Com: Feed-forward compensation using vision-based optimization for high-precision surgical manipulationIEEE Robotics and Automation Letters, 2021
ViO-Com: Feed-forward compensation using vision-based optimization for high-precision surgical manipulationIEEE Robotics and Automation Letters, 2021
2020
-
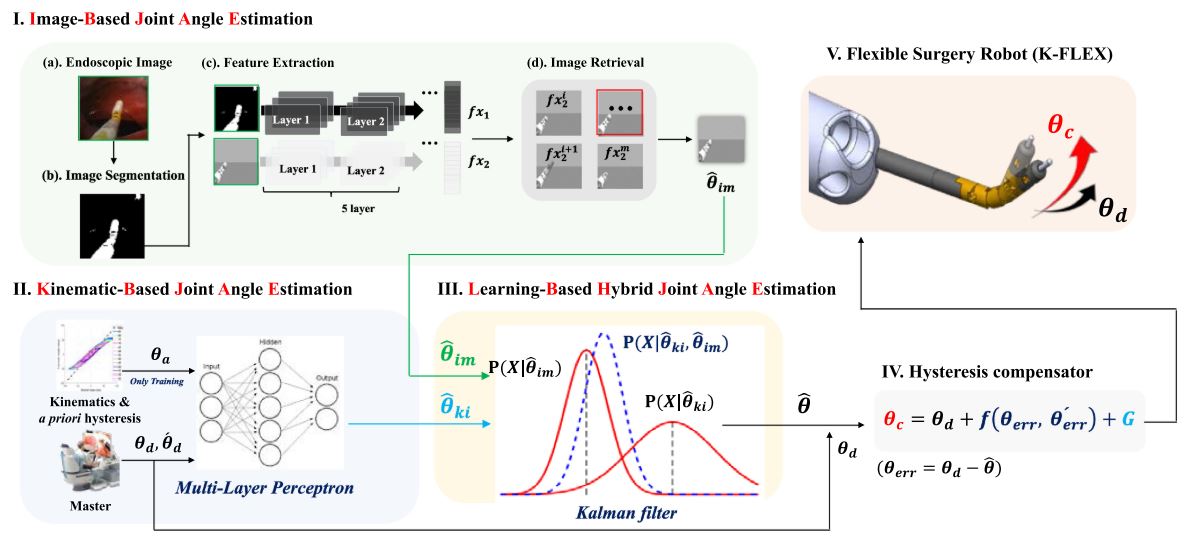 Hysteresis compensator with learning-based hybrid joint angle estimation for flexible surgery robotsIEEE Robotics and Automation Letters, 2020
Hysteresis compensator with learning-based hybrid joint angle estimation for flexible surgery robotsIEEE Robotics and Automation Letters, 2020
2019
-
 Hysteresis compensator with learning-based pose estimation for a flexible endoscopic surgery robotIn 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
Hysteresis compensator with learning-based pose estimation for a flexible endoscopic surgery robotIn 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 -
 Effects of flexible surgery robot on endoscopic procedure: Preliminary bench-top user testIn 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2019
Effects of flexible surgery robot on endoscopic procedure: Preliminary bench-top user testIn 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2019 -
 Shape-locking mechanism of flexible joint using mechanical latch with electromagnetic forceIEEE Robotics and Automation Letters, 2019
Shape-locking mechanism of flexible joint using mechanical latch with electromagnetic forceIEEE Robotics and Automation Letters, 2019